For many motion control applications, designers and engineers can choose between a servo or stepper motion control system. Much of this decision is driven by the motor, so this article will focus on this component, although the controller and the drive also play into the evaluation. Making the correct selection has long term benefits that positively impact production efficiency and overall lifecycle cost, while making the wrong choice can lead to performance and maintenance issues.
The basic difference between a stepper and a servo motion control system is the type of motor and how it is controlled. Stepper and servo motors have multiple magnetic poles energized by either a permanent magnet, or by feeding current through the coils of a winding.
Stepper motors are electric motors without commutators, a type of multipole brushless DC electric motor that divides a full rotation, typically into 50 to 100 equal steps. The motor’s position can be commanded to move and hold at any one of these steps without the need for a feedback sensor, such as an encoder. Although stepper motors can accurately move among their many poles incrementally, an encoder can be added for more precise positioning.
Typical servo motors have 4 to 12 poles, and with so few poles need feedback to keep track of their position. A servo motor is coupled with an encoder and a sophisticated controller, allowing for control of angular or linear position, velocity and acceleration. Servomotors are controlled by sending electrical pulses of variable width using a technique referred to as pulse width modulation (PWM).
Design Requirements
Understanding the application requirements by answering these questions is the first step in making a design selection between a stepper and a servo motion control system:
- How heavy is the load to be moved, and at what speeds?
- Torque requirements?
- Is torque limiting required?
- Is holding torque required?
- Position resolution required?
- Running speeds?
- Does the load change throughout the move?
Once these questions have been answered, the following design considerations will help guide the decision.
Design Considerations
The table compares some of the leading features of servos and steppers.
Table: Servo and Stepper Features
|
Feature |
Servo |
Stepper |
|
Position Feedback |
Required |
Optional |
|
Torque vs Speed |
Constant |
Varies |
|
Holding Torque |
No |
Yes |
|
Torque Control |
Yes |
No |
|
Tuning Required |
Yes |
No |
|
Support Dynamic Loads |
Yes |
No |
|
Low Speed Smoothness |
Good |
Excellent |
|
Programming |
Complex |
Simple |
|
Size |
Larger |
Smaller |
Position Feedback – Servo systems run closed loop, so position feedback is a requirement. A stepper system runs open loop, with position commanded to move and hold at one of its steps without any feedback required. An incremental or multi-turn absolute encoder can be added as an option in stepper motor applications requiring more precise positioning.
Torque versus Speed – The weight of the load and the speed at which it needs to be moved help determine the torque requirements. As shown in Figure 1, servo motors have constant torque across their speed range, while stepper motors have higher torque at low speeds and less at high speeds.
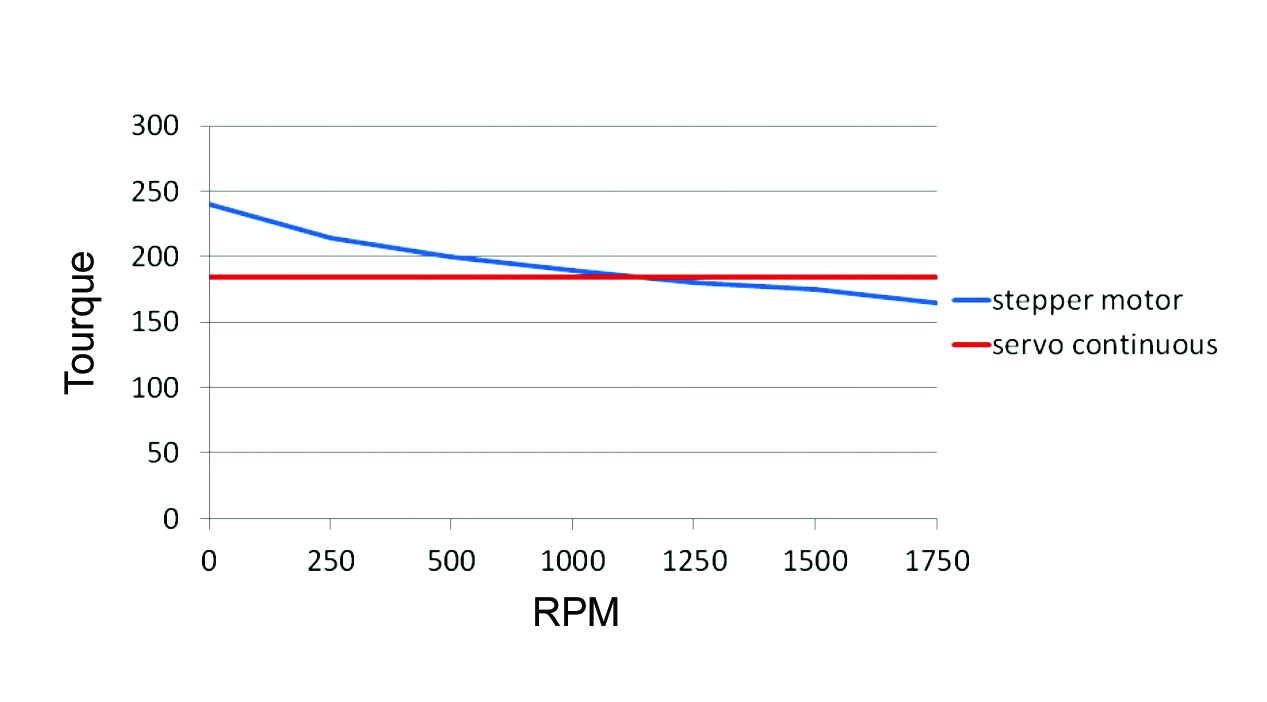
Figure 1, Torque Curve, courtesy of AMCI. Stepper motors have higher torque at low speeds than servomotors until speeds reach about 1,200 to 1,500 RPM.
Holding Torque – Holding torque is the amount of torque needed to move the motor one full step when the windings are energized but the rotor is stationary. Stepper motor torque is usually measured in ounces per inch. Stepper holding torque can be regulated by the amount of current (idle current) put through the motor at rest. At 100 percent idle current, full torque can be expected from a motor. A servo motor does not have this function, one of the factors contributing to its lower torque at low speed as compared to a stepper motor. Positioning applications where the motor shaft may experience minor rotational force at rest require holding torque. Typical applications where the holding torque provided by stepper motors is required include camera, diverter gate and vertical load positioning.
Torque Control – The current control of a servo motor is a much more complex compared to a stepper motor, with the regulation of the current going through the servo motor helping to regulate the torque. This makes servo motors a good fit for applications where torque must be managed, such as web control.
Tuning Required – Servo systems require tuning, which can make control quite complex. For example, if a load is running at very slow speeds, substantial oscillation may occur without proper tuning. The straightforward control of a stepper motor does not require tuning, resulting in simpler control.
Support Dynamic Loads – Servo motors can support dynamic loads, so if the expected load increases, the servo can respond with peak torque. Stepper motors don’t have this feature.
Dynamic load applications where the weight changes often and unpredictably benefit from servo motors. Conveyors moving variable weight products are a good example.
Low Speed Smoothness – Stepper motors have excellent low speed smoothness, with features such as micro stepping providing precise speed change without the drift and hunting often found with servo systems. Applications requiring low speed smoothness include pumps, video scanners, optical measuring systems and low-speed conveyors.
Programming – Designers and engineers are often challenged by the complexity of programming servo systems. By contrast, stepper system programming is much simpler, reducing required design effort by eliminating cryptic coding. This enables quick implementation in a wide variety of applications. Integrated PLC and stepper motion control systems simplify applications using user-defined macro instructions embedded in PLC programming software, configured with drag and drop commands to perform control of multiple axis, typically up to 12 (Figure 2).
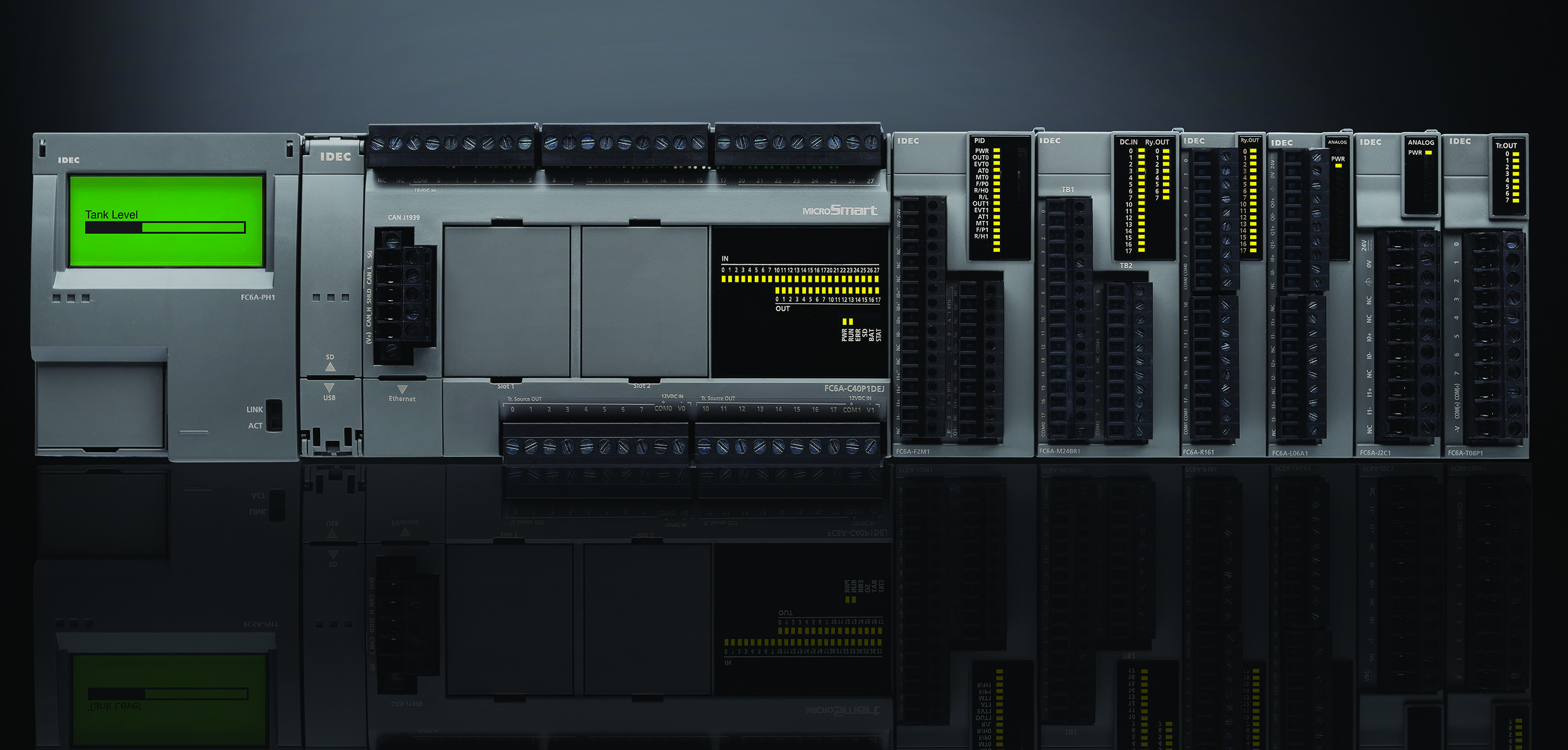
Figure 2, FC6A PLC, courtesy of IDEC. This IDEC PLC comes with embedded motion control macro instructions, allowing users to quickly and simply implement single- and multi-axis stepper motion control.
Size – Stepper motors are more compact then servo motors, allowing them to fit into smaller spaces in machines. Smaller size also makes it easier to integrate a stepper motor, drive and controller into one housing (Figure 3). This self-contained stepper motion control system simplifies integration and installation, reduces field wiring and saves space.
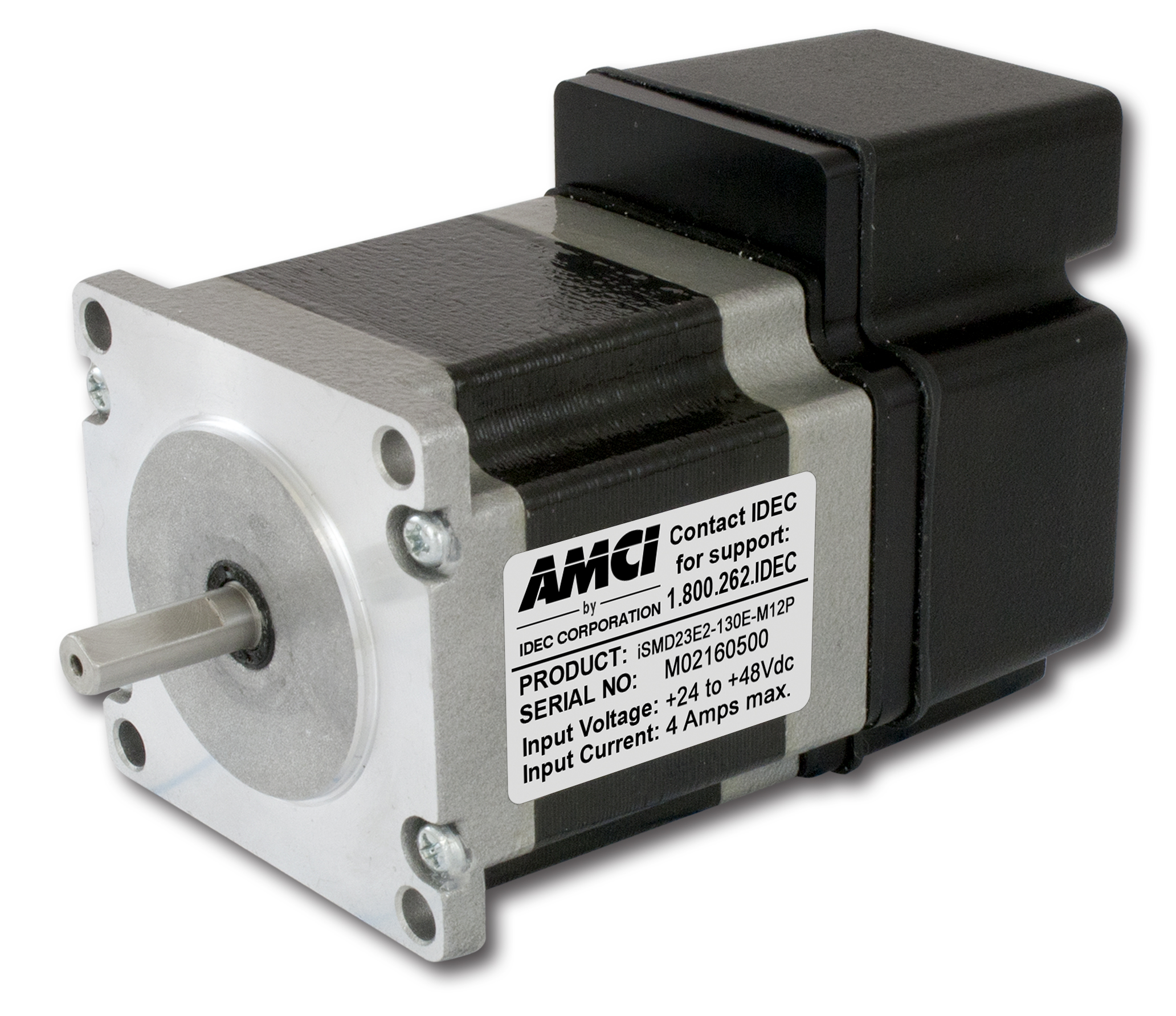
Figure 3, Integrated Stepper Motor-Drive-Controller, courtesy of AMCI. Stepper motors are very compact, allowing them to fit into small spaces in machines, or to be integrated with a drive and controller as depicted here.
The following example shows how a stepper motion control system solved a paint filling problem.
Improving Paint Filling Accuracy and Repeatability
A major art supplier was having production problems due to under- and over-filled paint bottles. The problems were due to the existing pneumatic paint filling systems, which suffered from wide variations in supply air pressure and limited fill adjustments of the pneumatic cylinder.
The engineering team applied a stepper-based linear actuator to replace the pneumatic cylinder, with the stepper drive and controller interfaced to the plant’s existing PLC. Commands from the PLC were sent directly to the stepper controllers and drive over a Modbus digital communications network. This provided a centralized control architecture, and a single point of interface for the operator.
Adjustments to the linear actuator controlled by the stepper motor were made by the operator using the existing HMI, eliminating the need for a second user interface. Set up changeovers were accomplished with simple push of a button, in contrast to the pneumatic system which required adjustment of the cylinder. Replacing the variability of the pneumatic air supply with an accurate and repeatable stepper-based actuator resulted in a quick payback of the upgrade cost due to the reduced rejects from underfills and the elimination of lost profits due to overfills.
Summary
As compared to more complex servo motion control systems, steppers are a simpler technology and require no tuning or adjustment. They also have excellent torque at low speeds, don’t require position feedback, and have very low maintenance requirements.
A servo motor control system is required when the application demands torque control or support for dynamic loads. In these situations, and in certain high precision applications, the added cost and complexity of servo control is a price that must be paid.
About the author
Matthew Tellier is a Product Manager of Motion Control Advanced Micro Controls, Inc., Terryville, CT. He can be reached at [email protected] or 860-585-1254, x117.
Filed Under: Drives (stepper) + amplifiers, Motion control • motor controls, Motors • stepper



